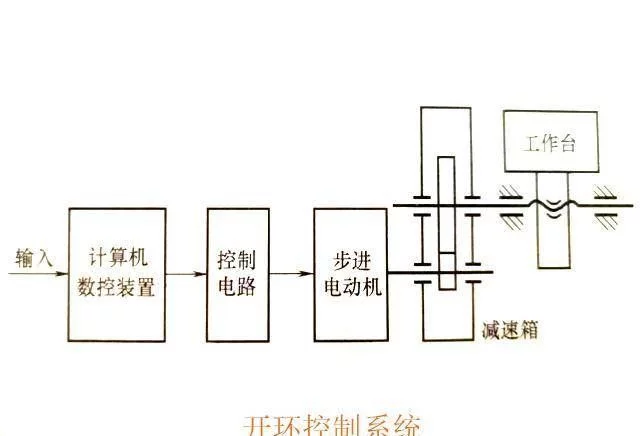
1. 开环控制系统
开环控制系统是指不带位置反馈装置的控制系统。由功率步进电动机作为驱动器件,运动系统是典型的开环控制系统。数控装置根据所要求的的移动速度和移位量,向环形分配器和功率放大电路输出一定的频率和的脉冲,不断改变步进电动机各绕组的供电状态,使相应坐标轴的步进电动机转过相应的角位移,再经过机械传动链,实现运动部件的直线移动或转动,运动部件的速度与位移量是由输入脉冲的频率和脉冲数所决定的。
开环控制系统具有结构简单、工作稳定、价格低廉等优点。但通常输出扭矩值的大小受到限制,而且当输入较高脉冲频率时,容易产生问题,难以实现运动部件的快速控制,不能进行误差校正,步进电动机的步距角误差、齿轮和丝杠组成的传动链误差都将直接影响零件加工的精度。目前,开环控制系统已经不能充分满足数控车床日益提高的对控制功率、快速运动速度和加工精度的要求。
2. 半闭环控制系统
半闭环控制系统是在开环控制系统的电动机轴上装有角位移检测装置,通过检测伺服电动机的转角,间接的检测运动部件的位移或角位移值,并反馈给数控装置的比较器,与输入指令进行比较,用差值控制运动部件。随着脉冲编码器的迅速发展和性能的不断完善,作为角位移检测装置可以方便地直接与直流或交流的伺服电动机同轴安装,特别是高分辨率的脉冲编码器的诞生,为半闭环控制提供了一种高性能价格比的配置方案,由于惯性较大的机床运动部件不包括在该环之内,所以控制系统的调试十分方便,并且具有良好的心态稳定性,甚至可以将脉冲编码器与伺服电动机设计成一个整体,使系统变得更加紧凑。但由于半闭环控制将运动部件的机械传动链不包含在闭环之内,所以机械传动链的误差无法得到校正或消除。
但目前广泛采用的滚珠丝杠螺母结构具有很高的精度和精度保持性,而采用可靠的消除反向运动间隙,完全可以满足大多数数控车床用户的需要,并且该控制系统具有调试方便、稳定性良好、成本低,并兼顾开环控制系统与闭环控制系统两者的特点。所以,在一般情况下,半闭环控制系统正在成为首选的控制方式被广泛地使用。
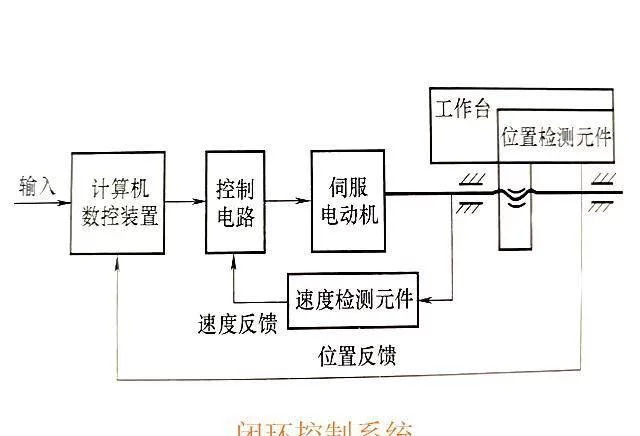
3. 闭环控制系统
在闭环控制系统,旋转检测装置直接安装在车床最终运动部件的相应位置。将直接检测到的位移或角位移值反馈给数控装置比较器,并与输入指令位移进行比较,利用差值控制运动部件,使运动部件严格按照实际需要的位移进行运动。闭环控制系统的主要优势是将传动链的所有环节纳入闭环。因此,理论上闭环控制的优势精度主要取决于检测装置的精度,而传动链的误差与此无关。其控制精度高于半闭环控制系统达尼波尔,除价格高外,对车床的结构和传动链仍提出了严格要求。传动环节的高度、间隙、导轨的低速运动特性、机床结构的抗震性能等因素都会增加系统调试的难度,甚至使伺服系统产生振动,降低稳定性。闭环控制具有加工精度高、移动速度快的特点。这种数控车床以直流伺服电动机或交流伺服电动机为驱动力。电机控制电路复杂,检测元件昂贵,调试维护复杂,成本高。